Dynamics-Aware Comparison of Learned Reward Functions
We propose a method for quantifying the similarity of learned reward functions without performing policy learning and evaluation.
Multi-Agent Imitation Learning for Driving Simulation
One potential method for validating autonomous vehicles is to evaluate them in a simulator. For this to work, you need highly realistic models of human driving behavior. Existing research learned human driver models using generative adversarial imitation learning, but did so in a single-agent environment. As a result, the model fails when you execute many of the learned policies simultaneously. This research performs training in a multi-agent setting to address this problem.

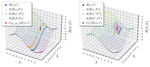
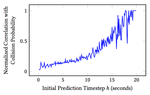
Intermediate-Horizon Automotive Risk Prediction
This research considers the problem of predicting whether a car will suffer a collision in the time period 10-20 seconds in the future. We formulate this task as policy evaluation in a MDP with a high-dimensional, continuous state space, and a reward function dominated by rare events (collisions). We then demonstrate that simulated data and domain adaptation models can be used to improve prediction performance on real-world data.
Collision Avoidance for Unmanned Aircraft Using Coordination Tables
How can UAVs with different collision avoidance strategies coordinate maneuvers so as to minimize collisions? This research presents an approach that enforces reasonable requirements on the behavior of UAVs, and as a result dramatically improves safety in dangerous encounters. The method is essentially to ensure that UAV maneuvers align with the directions of those advised by an optimal joint solution.
