Intro
If we want to control the robot through imitation learning, we need the ability to manually control it so as to gather data
Manual control requires programmatic control, i.e., the ability to specify end-effector positions and have the robot achieve those positions through changes in joint configurations
This post shows how to implement programmatic control of a simple two-link robot
Outline
Programmatic robot control
Forward kinematics
Inverse kinematics
Preview
VIDEO
Materials
This post only uses materials from previous posts
Background
Forward Kinematics
We’re focused on robotic manipulators aka robot arms, where the end of the robot arm is called the end-effector
Given all the information about a robot arm (length and mass of the links, the types of joints, how those joints and links are connected, etc) and the current configuration of the joints, how can you find out where the end-effector is?
Schematic
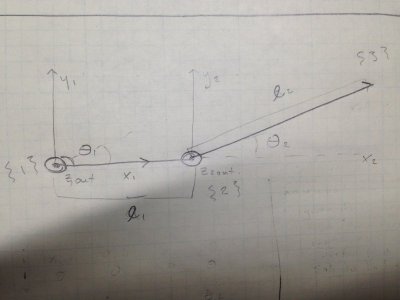
First, draw a schematic of the robot arm, assigning frames to the different joints
Figure 3 in these
notes provides a schematic for a two-revolute-joint robot (called an revolute-revolute (RR) manipulator)
revolute means the joint rotates, and the other option is prismatic meaning it translates linearly along its axis
Also, here’s a schematic with the frames labeled
DH Parameters
Second, derive
Denavit–Hartenberg parameters
DH parameters are one convention for expressing information about robotic manipulators
They make it easy to derive the transformation from each frame to the end-effector frame
Given the DH parameters, we can derive a transformation matrix from each frame to the frame of the end-effector
First, build transformation matrices from each frame to the next
Second, multiply these all together to find the transformation from the 0th frame to the end-effector frame
Section 3 of the referenced
notes provides the transformation matrix for the RR manipulator
Here’s the
code for computing the transformation matrix given the DH parameters
Inverse Kinematics
We just looked at the forward kinematics, which tell you the position of the end-effector given the configuration of the joints
What about the opposite question: given a (desired) position of the end-effector how do you figure out the joints that achieve that position?
This turns out to be a more difficult problem to solve
Since the forward kinematics involve nonlinear operations (sine, cosine), typically there’s no analytical solution for the joints
There can be many solutions, and there can also be no solutions
We’ll look at one method for solving the problem
Jacobian
The method we’ll use requires the Jacobian
The forward kinematics map from the joints config to the end-effector position
It’s a function mapping from dimension n to dimension m
If you differentiate each output with respect to each input, and arrange those derivatives in a matrix, that matrix is the
Jacobian
Given the transformation matrices, there’s a simple algorithm for finding the Jacobian
The code implementing the algorithm and along with a description can be found
here
Inverse Jacobian Method
The method we use for solving the inverse kinematics problem is called the inverse Jacobian method
It’s an iterative method that
Linearizes the function using the Jacobian
Solves for the change in joint configuration that moves the end-effector closest to the target position
This is accomplished by formulating the pseudoinverse of the Jacobian, hence the name
Updates the configuration
Repeats until the target is reached or it’s determined that it cannot be reached
Here’s a solid tutorial on it that steps through the logic and math
Here’s my implementation of it
This method does not explicitly deal with constraints on the movement of the manipulator
A faster solver that handles constraints will be the topic of a future post
Walkthrough
Hardware
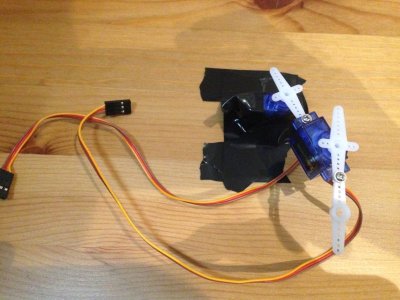
The two-link manipulator is just the connected servos from the previous post, which looks like:
Software
Download and setup the project code
git clone https://github.com/wulfebw/robotics_rl.git
cd robotics_rl
sudo python setup.py develop
Run the tutorial
code that randomly samples an end-effector position, and then solves for a joint configuration to achieves that position
import time
import rlrobo.manipulator
manipulator = rlrobo.manipulator.build_RR_manipulator(l1=1,l2=2)
while True:
pos = manipulator.random_position()
manipulator.set_end_effector_position(pos)
time.sleep(1)
Result
VIDEO